overview
What you get with Snowy-Lane?
Snowy-Lane is the first dataset for robust lane detection in snow covered environments
Snow Coverage
Snowy-Lane is the first large scale dataset with snow covered roads
Large Scale
Snowy-Lane consists of a summer condition dataset with 20,000 frames and to snowy subsets with 30,000 frames each
Synthetic Dataset
Synthetic Dataset created using CARLA simulator
Novel Map
A novel map representing a rural environment in southern germany including delineator assets
Comprehensive Sensor Suite
Snowy-Lane not only provides high-resolution camera images but also LiDAR point clouds
Extensive Annotations
We provide 2D, 3D, Map data and vehicle state ground truth information
Environment
Synthetic Environment
Snowy-Lane is a synthetic dataset generated using CARLA simulator
Novel Map
A novel realistic high quality map representing rural environment in southern germany including german road assets
Diversity
Besides varying snow coverage intensities, also varying lighting conditions and precipitation is included
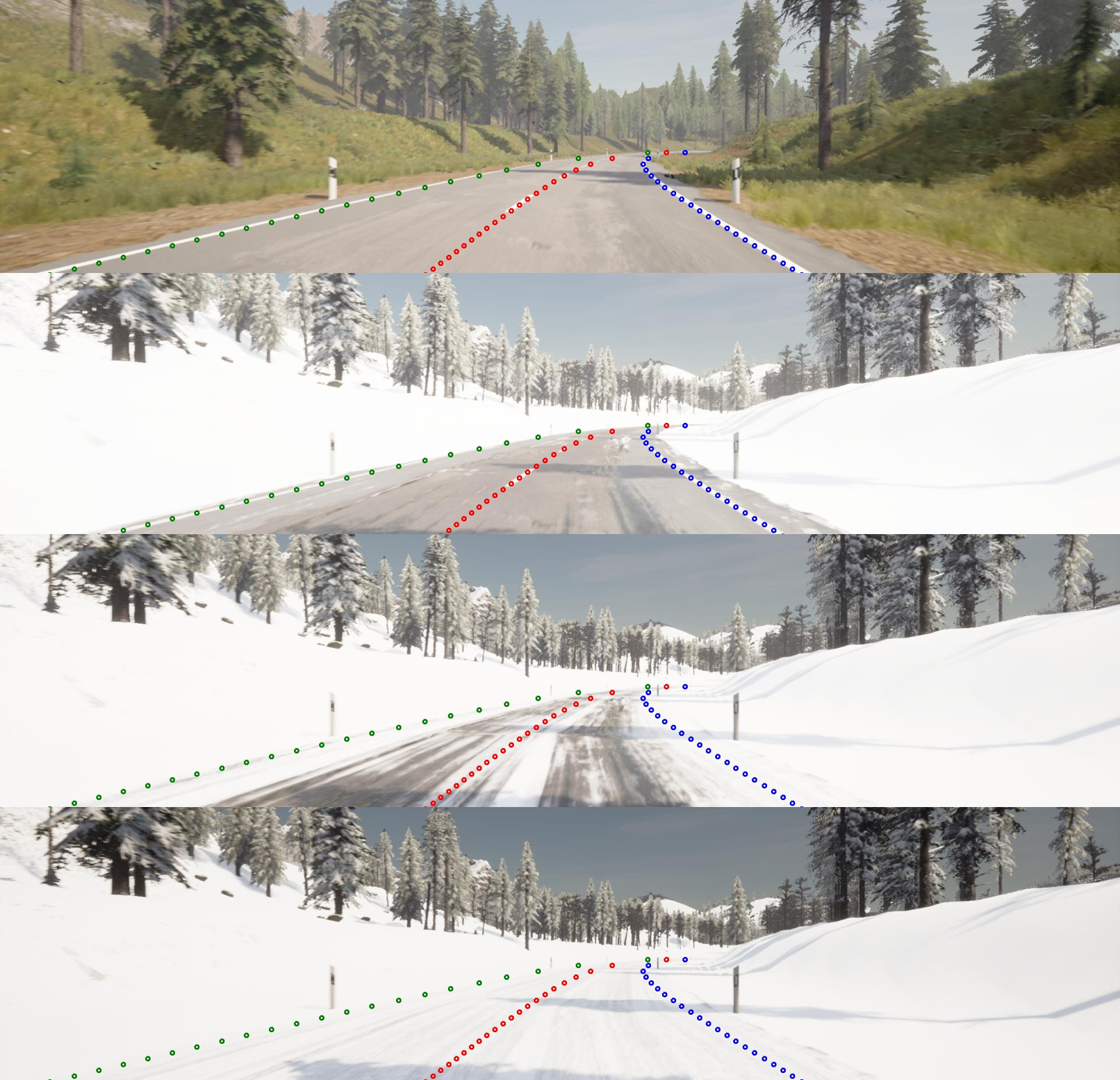
Snow Coverage Intensities
No Snow
Summer conditions without any snow
Light Snow
Snow covered environments with no snow on the road. Road is wet.
Medium Snow
Road is partially covered with snow. Tyre tracks are free of snow
High Snow
Full snow coverage of the road including tyre tracks
Data
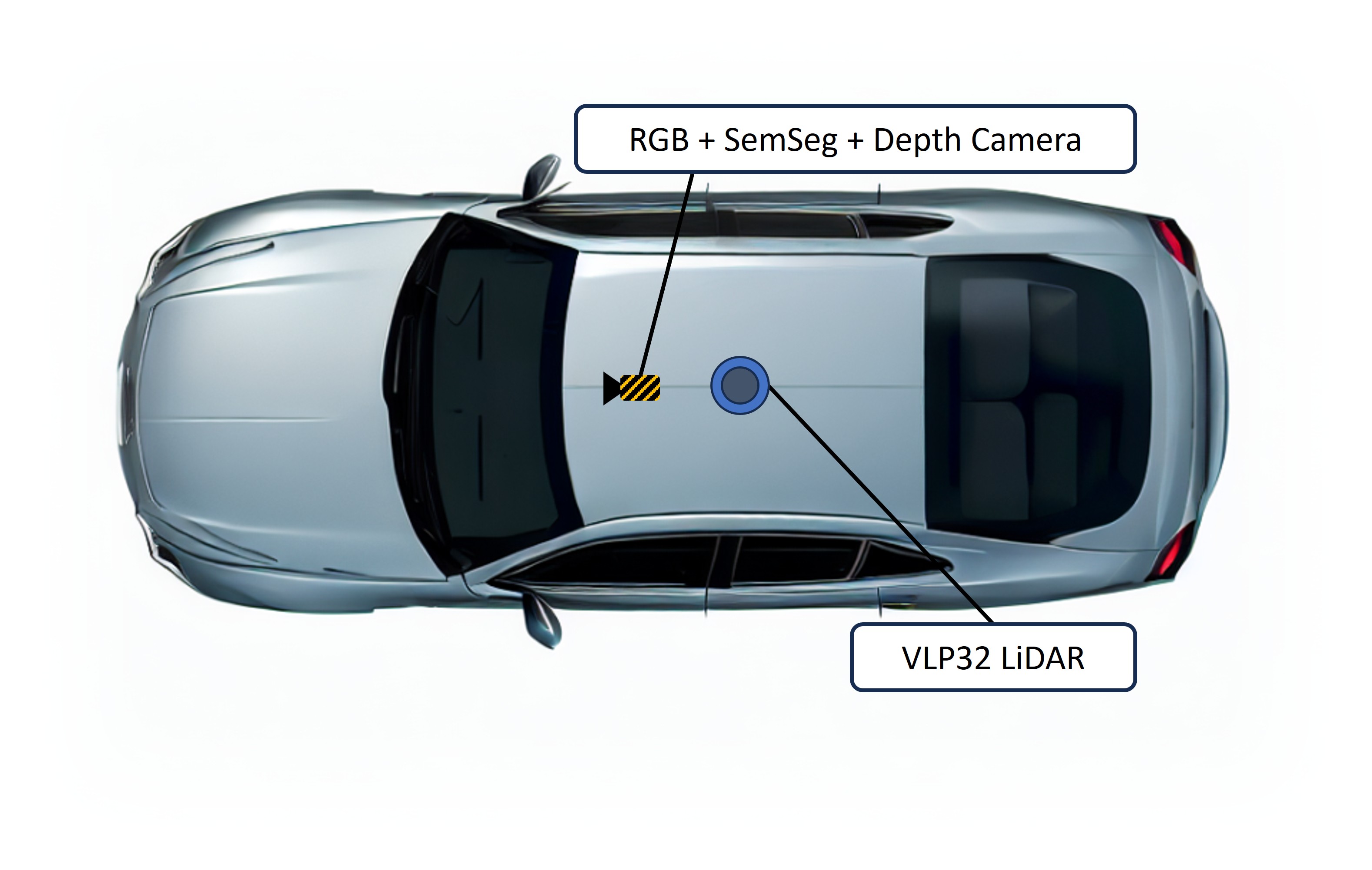
High Resolution Cameras
We provide image data from a RGB camera, semantic segmentation and depth camera with 1920x1080 px.
360° LiDAR
We include a 360° 32-layer LiDAR sensor with 200m sensing range
Extensive Labels
We include 2D labels in TuSimple format, 2D + 3D bounding boxes for delineators
Map data
Map information is provided in OpenDrive and Lanelet format
Vehicle State
Information about the vehicle state (position, velocity, dimension,... ) are provided for usage of improved metrics such as Lane Safety Metric
Results
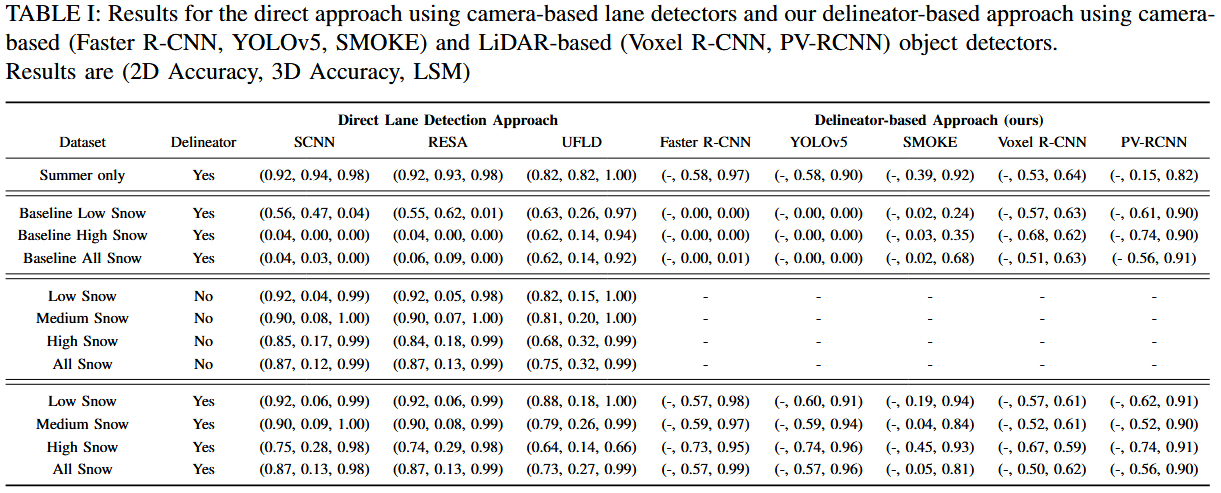
Metrics
For evaluation we use the TuSimple 2D accuracy, a 3D accuracy with 0.10 m threshold and the Lane Safety Metric (LSM). Results are reported with (2D accuracy, 3D accuracy, LSM)
Lane Detectors
As a baseline we use three camera-based state-of-the-art lane detectors: SCCN, RESA and UFLD
Camera-based Delineator Approach
For our delineator-based approach we use Faster-RCNN and YOLOv5 for image-based object detection
LiDAR-based Delineator Approach
For comparison of out delineator-based approach we also use LiDAR-based detection with the PV-RCNN and VoxelRCNN detector

FAQs
Frequently Asked Questions
Why should I use Snowy-Lane?
Snowy-Lane is the first large scale lane detection dataset including snow covered roads. This allows for improving robustness of lane detection methods under such adverse conditions.
How many Frames does Snowy-Lane consist of?
Snowy-Lane consists of 100 clips with 100 frames per subset and snow-coverage which leads to a total of 30,000 frames with delineators and 30,000 without. Additionally, 20,000 images under summer conditions are provided.
What is the Train/Validation/Test Split?
For Snowy-Lane a 80/10/10 split per subset is used. Hence, 24,000 frames are for training and 3,000 each for validation and test
Who created Snowy-Lane?
Snowy-Lane was created by Jörg Gamerdinger and Sven Teufel (PhD students @ University of Tübingen), assisted by Benedict Wetzel (MSc. student) and Patrick Schulz (PhD student @ FZI). The work was supervised by Prof. Oliver Bringmann (Head of Embedded Systems Group, University of Tübingen). Thanks to all my co-authors supported this work
Who can be contacted in case of questions?
You can send an e-mail to Jörg Gamerdinger (joerg.gamerdinger(at)uni-tuebingen.de
How to cite this Work?
Citation will follow