Scenarios
Diverse Scenarios
Over 40 diverse scenarios in urban, suburban, rural and highway environments
Two Novel Maps
Two novel digital-twin maps from Karlsruhe and Tübingen (Germany) for a more realistic environment
Diverse Road Users
First synthetic collective perception dataset including not only cars, vans, motorcyclists but also cyclists and pedestrians
Edge Case Scenarios
Edge cases like a roundabout or a tunnel sections to allow for a comprehensive evaluation

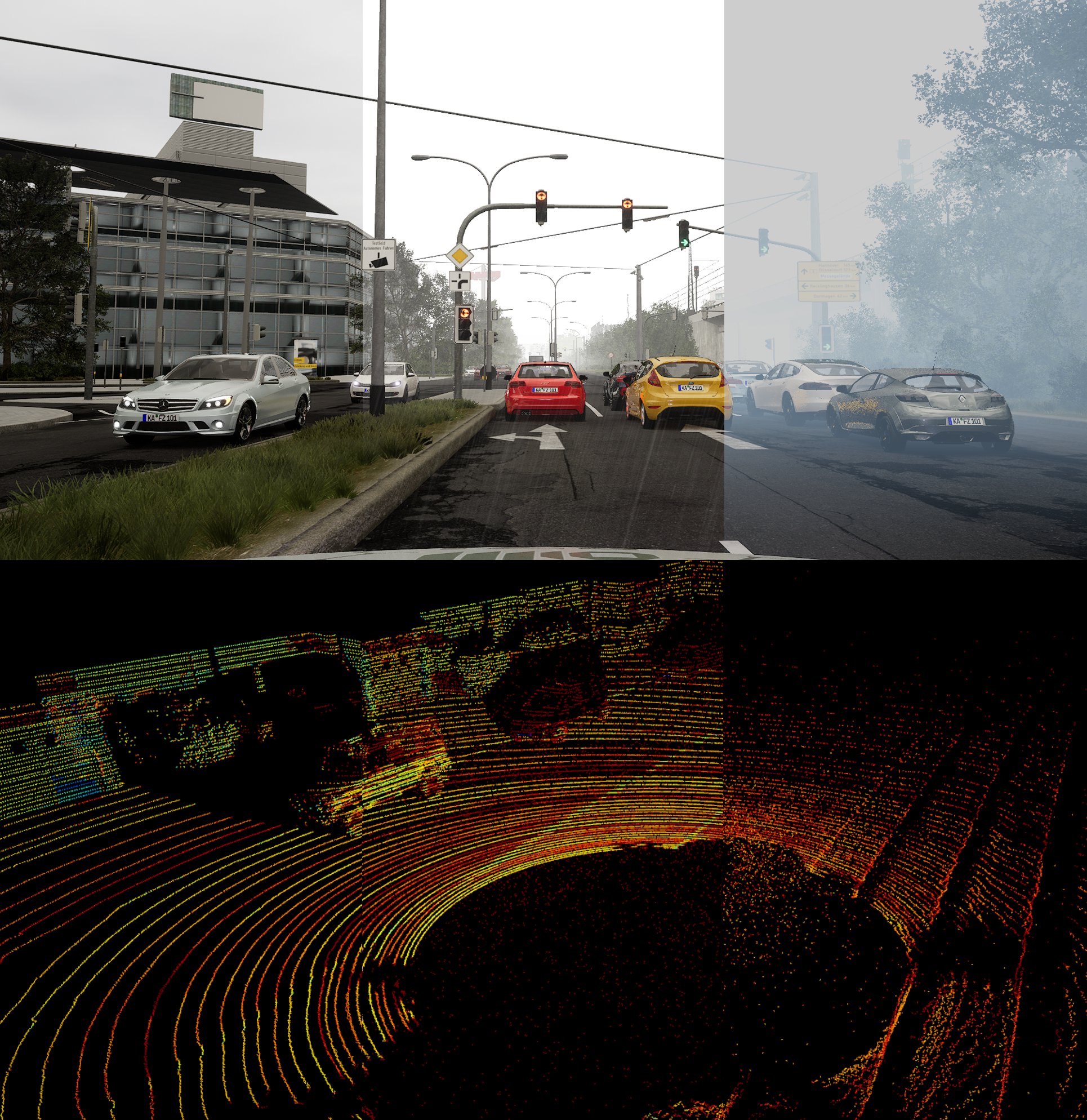
Environmental Conditions
Times of Day
Recordings on different times of day including night time
Weather Conditions
Three varying intensities for rain and fog to allow for an evaluation under adverse weather
Image Augmentation
Realistic and physically-accurate rendering of falling rain with raindrops on windshield and fog on image data
Point Cloud Augmentation
Realistic models to augment point clouds to simulate weather-affected LiDAR data
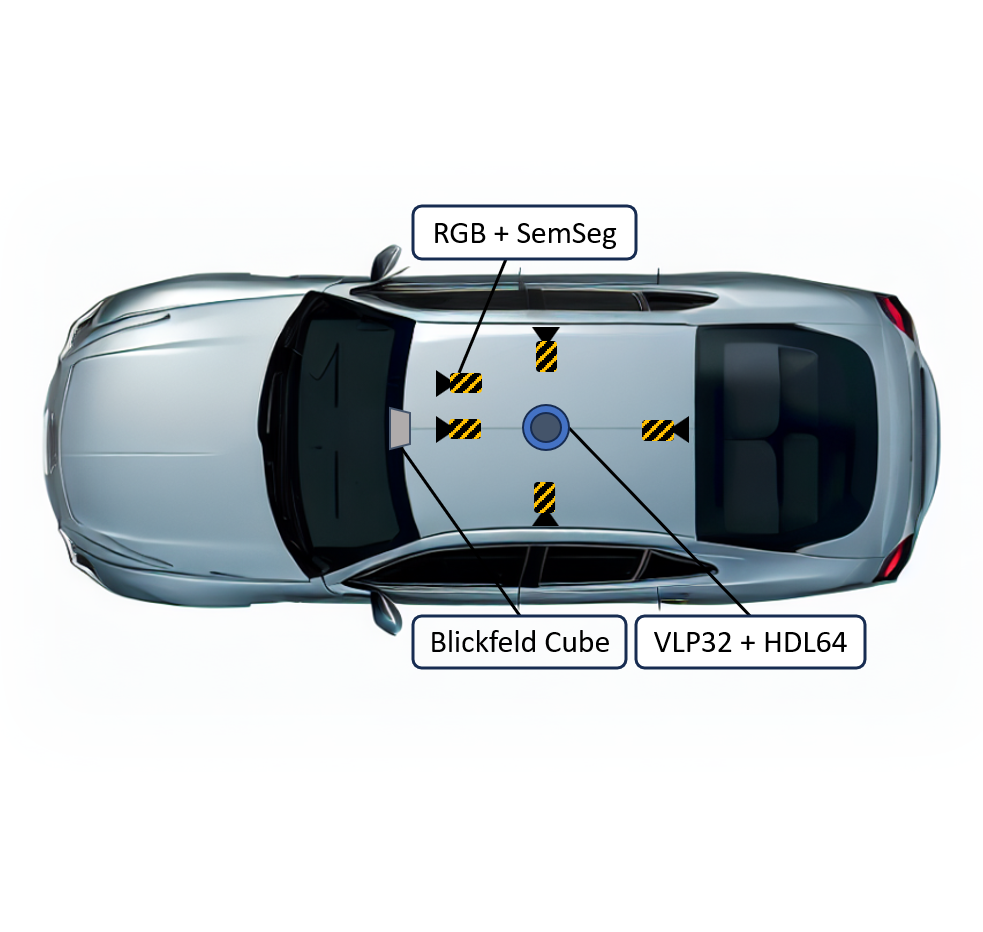
Sensor Suite
Sensor Carriers
The sensor suite is mounted on a varying number of connected and automated vehicles (CAVs) and Roadside Units (RSUs) per scenario
RGB Cameras
Five RGB cameras provide stereo images as well as a 360° surround view with a resolution of 1920x1080 px
Semantic Segmentation Cameras
Five semantic segmentation cameras with same specificataion as for the RGB cameras
32 and 64-layer 360° LiDARs
Realistic LiDAR sensor model for 32-layer and 64-layer 360° LiDAR (Velodyne VLP32 and HDL64)
Solid State LiDAR
First dataset integrating a solid state LiDAR (Blickfeld CUBE)
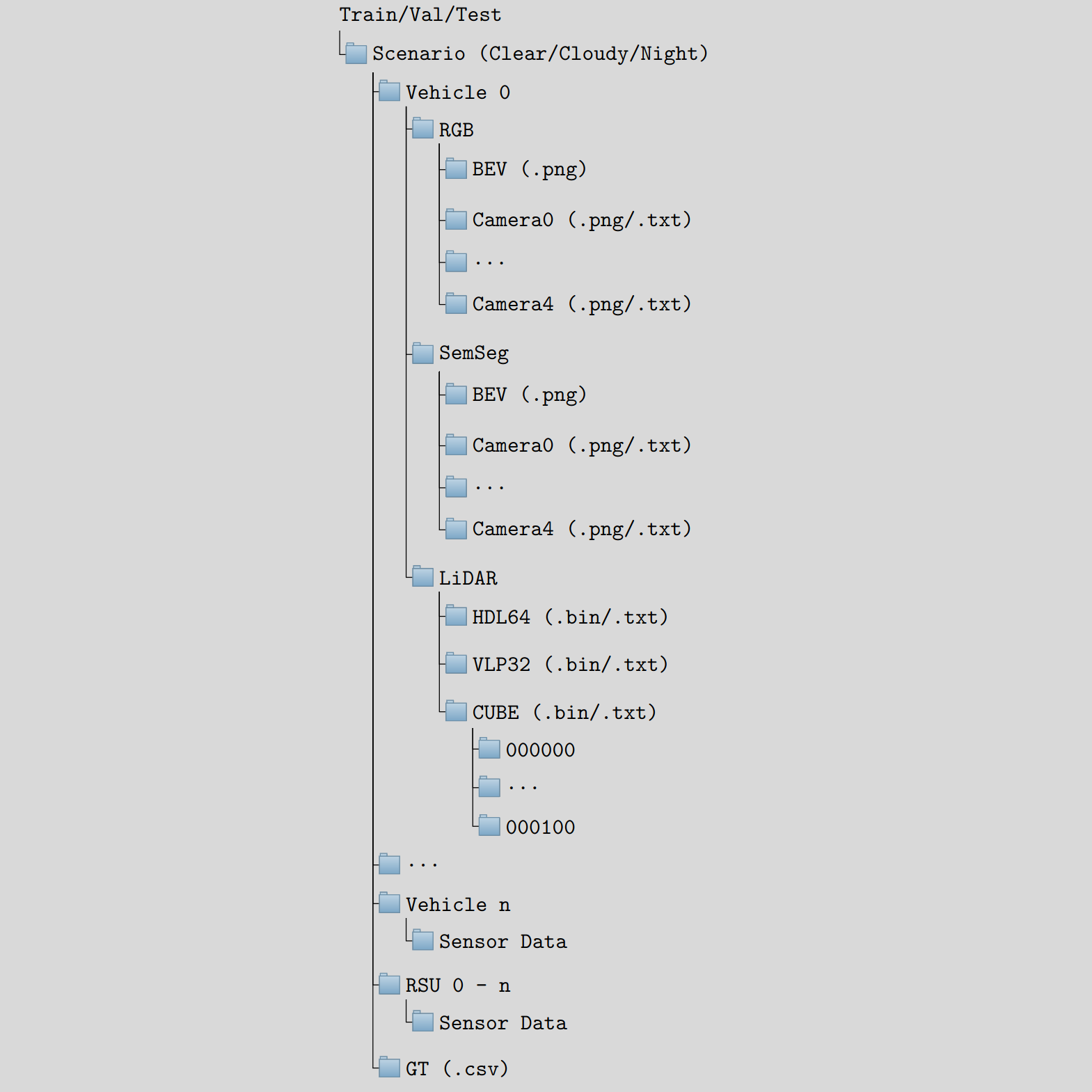
Data Structure
Seperate Environmental Conditions
Weather conditions are given seperately to allow for an independent evaluation
Data Hierarchy
Hierarchically structured sensor data and transformation matrices per vehicle per scenario
Coordinate Transforms
Easy coordinate transformation with already given transformation matrices for each vehicle and sensor
File Formats
Common file formats such as .bin, .txt, and .png for an easy and efficient data loading
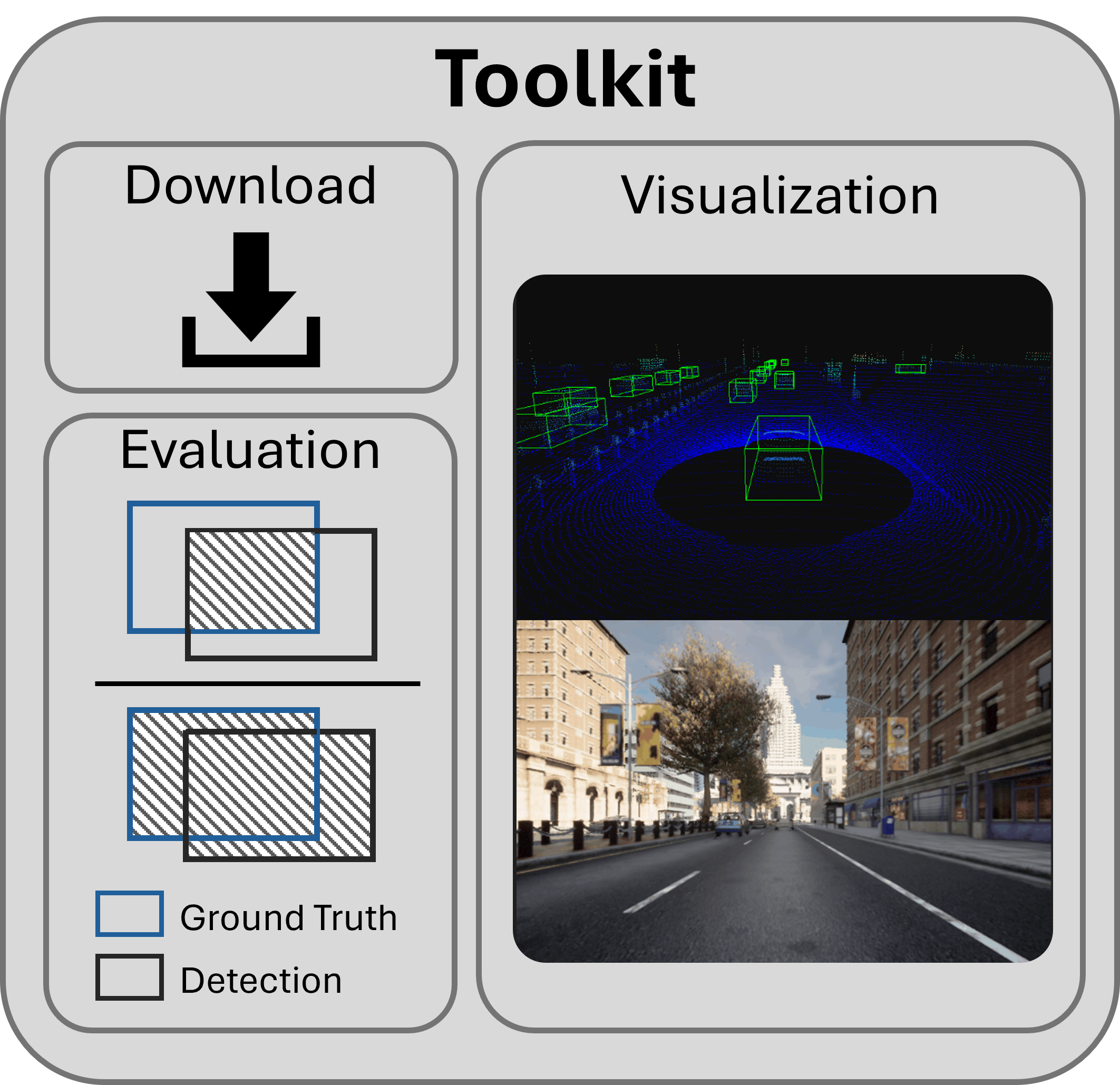
Toolkit
Installation
Super easy toolkit installation, just run: pip install scope-toolkit
Download
Efficient parallel downloading and extraction into the correct structure
Visualization
The visualization module allows for an easy exploration of the dataset
Data Loading
Provided dataset class for efficient training and testing in PyTorch
Evaluation
Evaluation module for easy and fair comparison of different methods using state-of-the-art metrics
FAQs
Frequently Asked Questions
Why should I use SCOPE?
SCOPE is the most comprehensive synthetic collective perception dataset. It is the first dataset with realistic LiDAR sensor models including a solid state LiDAR and weather simulations for camera and LiDAR. Moreover, in contrast to other publicly available datasets vulnerable road users are included.
How many Frames does SCOPE consist of?
SCOPE consists of 44 scenarios with a scenario length of 100 frames (10s) with four environmental conditions each. This results in a total of 17,600 frames.
What is the Train/Validation/Test Split?
SCOPE consists of 12,320 frames for training, 1,760 frames for validation and 3,520 frames for testing.
How many Sensors/Vehicles are present in the Dataset?
Vehicles and Roadside Untis are equipped with sensors. The scenarios contain up to 24 collaborative agents (20 CAVs + 4 RSUs) and up to 60 further road users as passive traffic.
Who created SCOPE?
SCOPE was created by Jörg Gamerdinger and Sven Teufel (PhD students @ University of Tübingen), assistent by Stephan Amann, Jan-Patrick Kirchner and Süleyman Simsek (BSc./MSc. students). The work was supervised by Prof. Oliver Bringmann (Head of Embedded Systems Group, University of Tübingen)
How to cite this Work?
@INPROCEEDINGS{SCOPE-Dataset, author={Gamerdinger, Jörg and Teufel, Sven and Schulz, Patrick and Amann, Stephan and Kirchner, Jan-Patrick and Bringmann, Oliver}, booktitle={2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC)}, title={SCOPE: A Synthetic Multi-Modal Dataset for Collective Perception Including Physical-Correct Weather Conditions}, year={2024}, pages={1-8} }